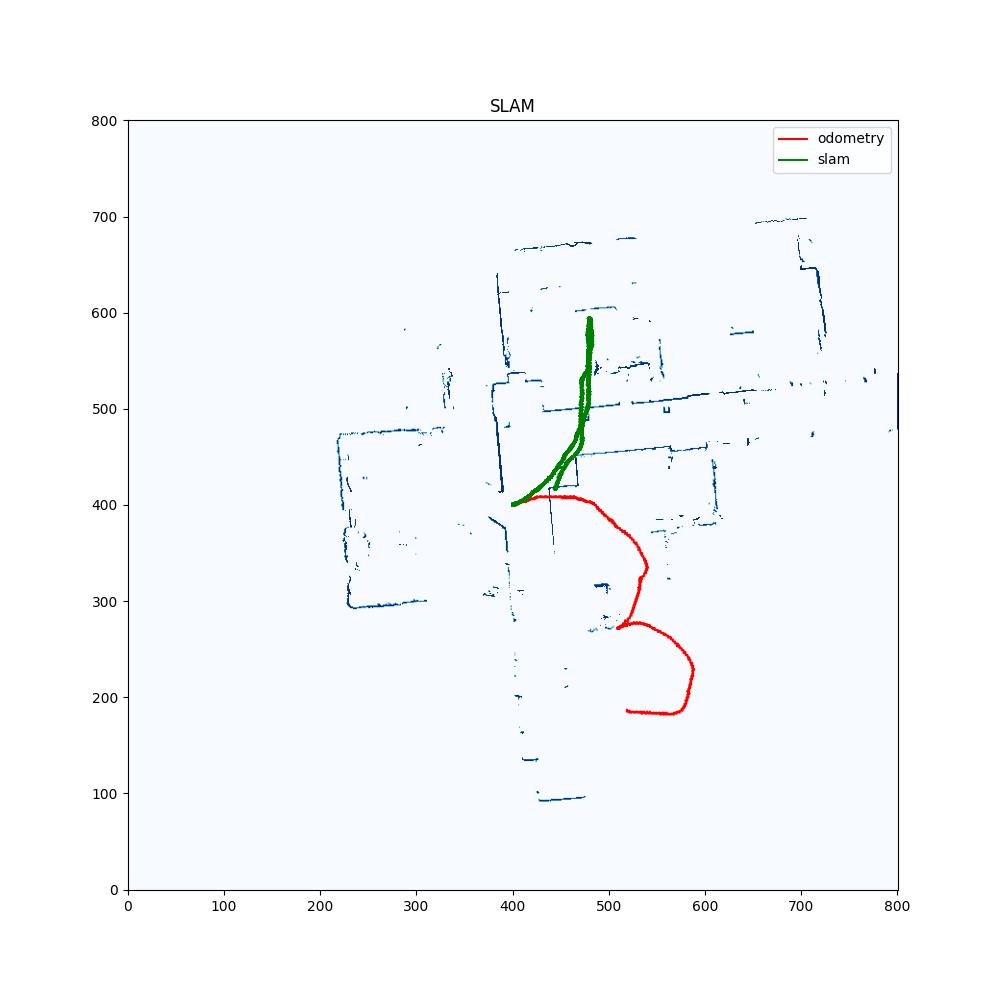
LiDAR-based Particle Filter SLAM Robotics Feb 01, 2024 Report PREVIOUSImplement Kalman Filters From ScratchNEXTRaft